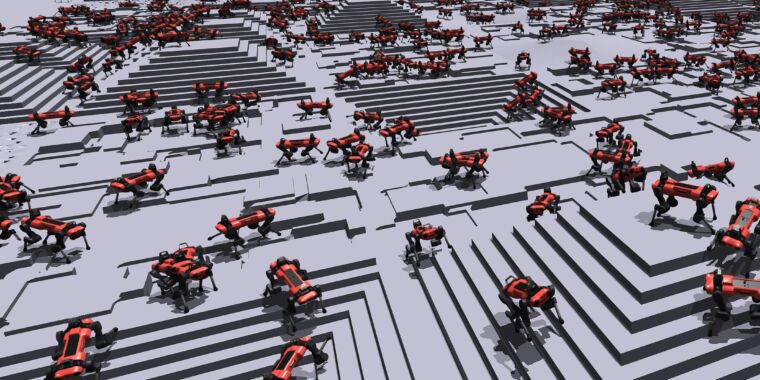
A marching army of over 4,000 robot-like doglike dogs is an intimidating sight even in a simulation. It may be a sign that machines can learn new tricks.
Researchers from ETH Zurich, Switzerland and Nvidia, the chipmaker, created the virtual robot army. The wandering bots were used to train an algorithm which was used to control the legs and arms of a real-world robotic arm.
The machines, called ANYmals, faced steep drops, steps and slopes in the virtual environment. Researchers presented a new challenge each time a robot learns to navigate it. This pushed the control algorithm to become more complex.
The resulting scenes look like an army of ants moving across large areas from a distance. The robots learned to walk up and down stairs quickly during training. More difficult obstacles took longer. Although some robots were able to slide down slopes, it proved difficult for others.
Advertisement
The algorithm was then transferred to ANYmal, a robot that is approximately the same size as a large dog and has sensors on its head. It was capable of moving up and down stairs, but it had problems with higher speeds. Researchers blamed the inaccuracies of the sensors' perception of the real world in comparison to the simulation.
Similar robot learning methods could be used to help machines learn how to do various tasks, such as sorting packages, sewing clothes, and harvesting crops. This project also highlights the importance of custom computer chips and simulation for future advancements in applied artificial intelligence.
Very fast simulation at a high level is a great thing to possess, according to Pieter Abbeel (UC Berkeley professor and cofounder of Covariant), a company that uses AI and simulations for training robot arms to sort and pick up objects for logistics companies. He claims that the Swiss and Nvidia researchers had some speed-ups.
AI has been shown to be able to train robots to perform real-world tasks that are difficult or impossible for software developers. It is difficult to write code that allows you to grasp unfamiliar, awkward, or slippery objects.
The reinforcement learning method, which is an AI method that uses positive and negative feedback to teach the simulated robots, was used to train them. An algorithm evaluates how robots' movements affect their ability to walk and adjusts control algorithms accordingly.




