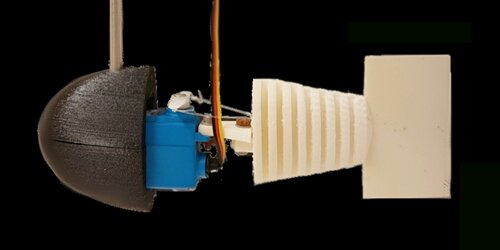
This is the simple robot unit developed by researchers. The white material was 3D printed with deformable polymers. Two cables are driven by a servomotor (blue), which allows the robot to deform. The dark part of the robot is 3D printed from a solid material. Credit: Sanchez Rodriguez et al.Roboticists have created a wide range of robots that are inspired by animals, nature, and humans over the past decade. Robots must look and move like humans or animals in order to be able to mimic them.Researchers from Universit Cte d'Azur - CNRS recently developed a bioinspired method to create fish-like swimming in robots. The mechanism was described in a paper published by Physical Review Letters. It is based on proprioception, which is the ability of animals and plants to sense their position, speed, and acceleration.Mederic Argentina, one the researchers behind the study, said that he and his colleagues M. Gazzola (and L. Mahadevan) have discovered a general law that predicts underwater swimmers' velocity as a function their swimming gait. This is a function of the amplitude of the fin/tail stroke and frequency. "Our research provided a rational explanation for this scaling law that worked on swimmers from a few centimetres to the longest animals such as blue whales (30m).The researchers collected kinematic data on tail undulation to test their model. This has not been done in live animals yet. They were also interested in understanding how swimmers can control the frequency and amplitude of their tail motion. They created a small, flexible robot that could biomimetically shape to achieve this goal.Argentina stated that the robotic platform was able to validate our scaling law and also explore different scenarios to select the undulation kinematics. Proprioception, sometimes called the sixth sense, is an excellent candidate because it evaluates body deformation, acceleration, and the felt force. Our recent paper asked whether proprioception could control locomotion. We found that proprioceptive sensors can in fact induce steady swimming.Credit: Sanchez Rodriguez et al.Argentina and his collaborators have created a proprioceptive system that allows robotic swimmers to adjust their undulation to the environment around them. Most fish actually have lateral lines that measure the pressure on their bodies, which allows them to integrate proprioceptive sensing.Argentina stated that the idea was to use the robot's feedback to deform the tail. This approach is simple, robust, and could explain the selection of swimming gaits.Researchers tested their proprioceptive system on a biomimetic robotic robot. They compared its performance to a generic model of robotic swimming. The researchers' findings were very promising as they found that their system was comparable to the generic model and allowed for fish-like swimming in robots.Argentina stated that proprioception could also be used to create undulating robots that automatically adjust their kinematics according to the environment. "Our research demonstrated that a simple coupling between proprioception and tail movement could trigger instability that allows the tail to undulate, thereby allowing the swimmer to be thrust."The future could see aquatic robots with greater mobility in water thanks to the proprioceptive system developed by this group of researchers. Argentina and his collaborators will continue to improve the robot's capabilities.Argentina stated that the robot is currently learning to swim by using machine learning techniques. "Our first results give confidence that we will be able construct/design undulating robotics that swim with AI."Learn more Small robot swimmers can heal themselves from injuryAdditional information: Proprioceptive mechanism to bioinspired fish swimming. Physical Review Letters (2021). Journal information: Physical Review Letters Proprioceptive mechanism to bioinspired fish swimming. (2021). DOI: 10.1103/PhysRevLett.126.2345012021 Science X Network




